Optimization¶
Overview, Objectives, and Key Terms¶
In Root Finding, the bisection method and Newton’s
method were used to solve nonlinear equations. Now, those methods (and
tools like fsolve) are used to solve optimization problems. The
subject is rich, so we’ll touch on only the basics, but you’ll have
tools at your disposal to tackle such problems in varied applications.
Objectives¶
By the end of this lesson, you should be able to
- Find local extrema of a function \(f(x)\) using the bisection and Newton methods.
- Use
minimizeto solve nonlinear optimization problems.
Key Terms¶
- optimization
- uncontrained optimization
- constrained optimization
- extremum
- critical point
- objective function
- linear program
scipy.optimize.minimizescipy.optimize.linprog
Some Nomenclature¶
Optimization problems often defined by minimizing an objective function
subject to the inequality constraints
and/or the equality constraints
An optimization problem is unconstrained if it is subject to no inequality constraints and no equality constraints. Otherwise, the problem is constrained. In practice, unconstrained problems are often easier to solve using a variety of techniques for finding extrema. We’ll start with unconstrained problems and then consider an important class of constrained problems known as linear programs.
Finding Extrema¶
One of the great applications of differentiation is its ability to identify the critical points of a function \(f(x)\), which include its minima and maxima, i.e., its extrema. Suppose \(f(x)\) represents some quantity of interest, perhaps the cost of materials for some component or the signal-to-noise ratio of some sensor. If we want to mininimize those costs or maximize those ratios, we need to use optimization. Although optimization problems and the techniques to solve them are quite diverse, we will stick to 1-D problems in which the objective function to be minimized or maximized is continuous (as opposed to discrete).
You’ve had calculus (and we’ve reviewed some its topics). Hence, you might recall that a function \(f(x)\) exhibits an extremum, i.e., a minimum or maximum, at any point \(x\) for which \(f'(x)\) is zero and \(f''(x)\) is nonzero. When \(f'(x)\) and \(f''(x)\) vanish, the point is often called a saddle point, though that term is more meaningful in multiple dimensions.
Exercise: Given some fencing of fixed length L, what is the
largest area that fencing can enclose if arranged in a rectangle of
sides a and b?
Solution:
Here’s the problem. We want to maximize \(A = ab\) where \(2a+2b = L\) or \(b = L/2 - a\). We know \(L\) and \(b\) depends on \(a\), so there is just one free parameter (i.e., we’re in 1-D where we’ll stay throughout). Note that \(a\) (and \(b\)) can range from 0 to \(L/2\).
Formally, we see a solution to
which reads “find the value of \(a\) in the range \([0, L/2]\) that maximizes the quantity \(f(a) = a(L/2-a)\). Here, \(f(a)\) is the objective function.
Differentiation of \(f(a)\) gives
which, when set to zero, requires that \(a = L/4\). Consequently, \(b = L/2-a = L/4 = a\). That is to say, our fence must form a square to maximize the area enclosed.
The Connection To Nonlinear Functions¶
As the fence exercise illustrates, if we can write down the derivative and explicitly find the point at which it vanishes, our problem is solved. That is rarely the case. Often, the functions of interest have complicated derivatives that make \(f'(x) = 0\) a nonlinear equation. We generally can’t solve that problem directly. In many cases, we don’t even have \(f'(x)\), and at best, we can approximate it numerically using finite differences.
Further complicating matters is that even if we can solve \(f'(x)=0\), the result might not be an extremum (consider \(f(x)=x^3\) and the zeros of its derivative \(3x^2\)), and it might not be unique.
Consider the following example (for \(f(x) = \sin(x^22)-3)^2\)):
In [1]:
import matplotlib
%matplotlib inline
import nonlinear_plots
nonlinear_plots.extrema()
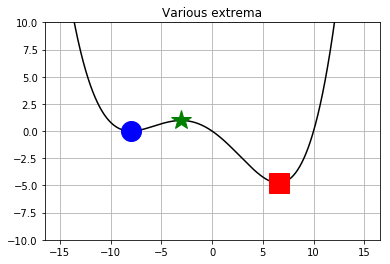
Of the three roots, two correspond to minima—but the left one (blue circle) is greater than the right one (red square), so is it really a minimum? Yes, if we make the distinction between local and global minima. For this problem, the right minimum is the global minimum, while the central root (green star) represents a local maximum (\(f(x)\) is unbounded, i.e., there is no value \(M < \infty\) such that \(|f(x)| < M\) for all possible values of \(x\)). Given the choice, a global optimum is usualy preferred, but for many cases, we’re at best guaranteed a local minimum. There are techniques to increase our chances of finding a global optimum, but that’s outside the present scope!
Solving Unconstrained Optimization Problems¶
When the Derivative is Available¶
If we have \(f(x)\) and can evaluate \(f'(x)\), then either Newton’s method or the secant method can be applied to \(f'(x) = 0\). The same goes for multi-variable problems, where the gradient \(\nabla f(\mathbf{x})\) replaces \(f'(x)\), and the hessian matrix \(\mathbf{H}(\mathbf{x})\) replaces \(f''(x)\).
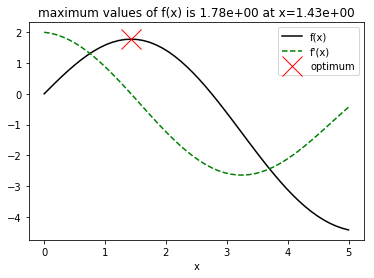
Exercise: Find the value of \(x\) that maximizes the function \(f(x) = 2\sin(x) - x^2/10\) starting with \(x_0 = 2.5\). Then, confirm your result by showing it on a graph of \(f(x)\).
Solution. We can immediately differentiate \(f(x)\) to find \(f'(x) = 2\cos(x) + x/5\) and \(f''(x) = -2\sin(x) + 1/5\). Then, Newton’s method gives
In [2]:
import numpy as np
import matplotlib.pyplot as plt
f = lambda z: 2*np.sin(z) - z**2/10 # objective function
fp = lambda z: 2*np.cos(z) - z/5
fpp = lambda z: -2*np.sin(z) - 1/5
x = 2.5 # initial guess
while abs(fp(x)) > 1e-12:
x = x - fp(x)/fpp(x)
x_vals = np.linspace(0, 5)
plt.plot(x_vals, f(x_vals), 'k', label='f(x)')
plt.plot(x_vals, fp(x_vals), 'g--', label="f'(x)")
plt.plot(x, f(x), 'rx', ms='20', label='optimum') # X marks the spot...
plt.xlabel('x')
plt.title('maximum values of f(x) is {:.2e} at x={:.2e}'.format(f(x), x))
plt.legend()
Out[2]:
<matplotlib.legend.Legend at 0x7f0c80f039e8>
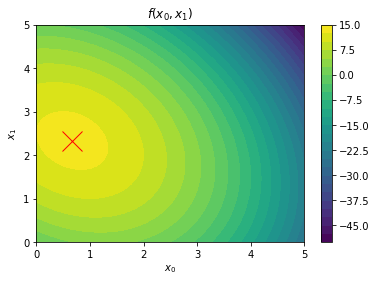
Exercise: Consider the objective function \(f(\mathbf{x}) = ax_0 + bx_1 - (2x_0^2 + x_0 x_1 + 2x_1^2)\). Compute \(\nabla f(\mathbf{x})\) and \(\mathbf{H}(\mathbf{x})\) (which is the jacobian of \(\mathbf{\nabla g}(x)\). Then, for \(a = 5\) and \(b = 10\), determine the values of \(x_0\) and \(x_1\) that maximize \(f(\mathbf{x})\) starting with \(\mathbf{x} = [1, 2]^T\).
Solution:
The gradient is
The hessian matrix is the jacobian matrix for \(\mathbf{\nabla f}(\mathbf{x})\), or
Now, apply Newton’s method:
In [3]:
import numpy as np
import matplotlib.pyplot as plt
f = lambda z: 5*z[0] + 10*z[1] - (2*z[0]**2 + z[0]*z[1] + 2*z[1]**2)
gf = lambda z: np.array([5-4*x[0]-x[1],
10-4*x[1]-x[0]]) # gradient of f
H = np.array([[-4.0, -1.0],
[-1.0, -4.0]])
# Apply Newton's method
x = np.array([1.0, 2.0])
while sum(abs(gf(x))) > 1e-8:
x = x - np.linalg.solve(H, gf(x))
# Plot the results and show where the maximum exists
x0, x1 = np.linspace(0, 5), np.linspace(0, 5)
x0, x1 = np.meshgrid(x0, x1)
plt.contourf(x0, x1, f([x0, x1]), 25)
plt.colorbar()
plt.plot(x[0], x[1], 'rx', ms=20)
plt.xlabel('$x_0$')
plt.ylabel('$x_1$')
plt.title('$f(x_0, x_1)$');
Using scipy.optimize.minimize¶
An alternative to Newton’s method is the minimize function in
scipy.optimize. From help(minimize), we find
Help on function minimize in module scipy.optimize._minimize:
minimize(fun, x0, args=(), method=None, jac=None, hess=None, hessp=None, bounds=None, constraints=(),
tol=None, callback=None, options=None)
Minimization of scalar function of one or more variables.
At a minimum, one must define (1) the function fun to minimize, and
(2) an initial guess x0 for the solution. The function minimize
returns an object with several attributes, one of which is the
solution x. Therefore, if one calls sol = minimize(fun, x0), the
solution is sol.x.
Exercise: Use minimize to find the maximum of
\(f(x) = 2\sin(x) - x^2/10\) starting with \(x_0 = 2.5\).
Solution: Note that any maximization problem can be turned into a minimization problem negating the objective function, i.e., \(f(x)\) becomes \(-f(x)\). Then:
In [4]:
import numpy as np
from scipy.optimize import minimize
f = lambda x: -2*np.sin(x) + x**2 / 10
sol = minimize(f, x0=2.5)
print(sol.x)
[1.42755179]
Example: Use minimize to find \(\mathbf{x} = [x_0, x_1]^T\)
that minimizes \(f(x) =x_0^2 - x_0 - 2 x_1 - x_0 x_1 + x_1^2\). Use
an initial guess of \(x_0 = x_1 = 0\).
Solution:
In [5]:
f = lambda x: x[0]**2 - x[0] -2*x[1] - x[0]*x[1] + x[1]**2
x_initial = [0.0, 0.0]
sol = minimize(f, x0=x_initial)
print(sol.x)
[1.33333353 1.66666666]
Solving Constrained Optimization Problems¶
Optimization with constraints is a much more challenging problem.
Although minimize can be used for such problems, we limit our focus
to a specific class of constrained optimization problems known as
linear programs.
The standard form of a linear program is
subject to
and
Note, the objective function is linear, and \(\mathbf{c}\) represents a vector of costs associated with each element of \(\mathbf{x}\).
The ideal tool for solving such problems is scipy.optimize.linprog,
for which help provides
linprog(c, A_ub=None, b_ub=None, A_eq=None, b_eq=None, bounds=None, method='simplex', callback=None, options=None)
Minimize a linear objective function subject to linear
equality and inequality constraints.
Linear Programming is intended to solve the following problem form::
Minimize: c^T * x
Subject to: A_ub * x <= b_ub
A_eq * x == b_eq
Here, A_ub and A_eq are two-dimensional arrays, while c,
b_ub, and b_eq are one-dimensional arrays.
Exercise. Use linprog to find \(\mathbf{x} = [x_0, x_1]^T\)
that maximizes \(x_0 + x_1\) subject to the constraints
Solution: Note first that the cost vector \(\mathbf{c}\) should be \([-1, -1]^T\) so that the sum of \(x_0\) and \(x_1\) is maximized. All of the inequality constraints can be cast in \(\mathbf{A}_{ub} \mathbf{x} \le \mathbf{b}_{ub}\) form by noting that if \(x_0 \ge 0\) then \(-x_0 \le 0\). Therefore, these constraints can be written as
Finally, there are no equality constraints. From here, linprog can
be used via
In [6]:
from scipy.optimize import linprog
import numpy as np
c = np.array([-1, -1])
A_ub = np.array([[-1.0, 0.0],
[0.0, -1.0],
[1.0, 2.0],
[4.0, 2.0],
[-1.0, 1.0]])
b_ub = np.array([0, 0, 4, 12, 1])
sol=linprog(c, A_ub, b_ub)
print(sol.x) # like minimize, linprog returns an object
# with attribute x
[2.66666667 0.66666667]
Exercise. Suppose the Acme Concrete Company is supplying concrete for three large-scale projects. The company has production facilities in four different locations. Projects 0, 1, and 2 require 250, 400, and 500 cubic meters of concrete each week. Plants A, B, C, and D produce 350, 200, 400, and 450 cubic meters each week. Although the plants, in total, produce more than enough to supply all three projects, the cost to provide the concrete depends on the distance traveled between the plant and the project. The cost per cubic meter to ship from any plant to any project is summarized n the table below:
| 0 | 1 | |
|---|---|---|
| A | 10 | 20 |
| B | 15 | 5 |
| C | 25 | 20 |
| D | 30 | 10 |
How much should each plant supply to each project? Convert this problem
into a linear program, and then use linprog to determine the
solution.
Further Reading¶
Checkout out the SciPy documentation on optimization and root finding.